

ROS2 Robot Control Board 3.0 توسعه یافته ROS2 Car Driver Extension IMU Raspberry Pi 5، با صفحه نمایش OLED، کابل نوع C، پشتیبانی از منبع تغذیه Raspberry Pi 5
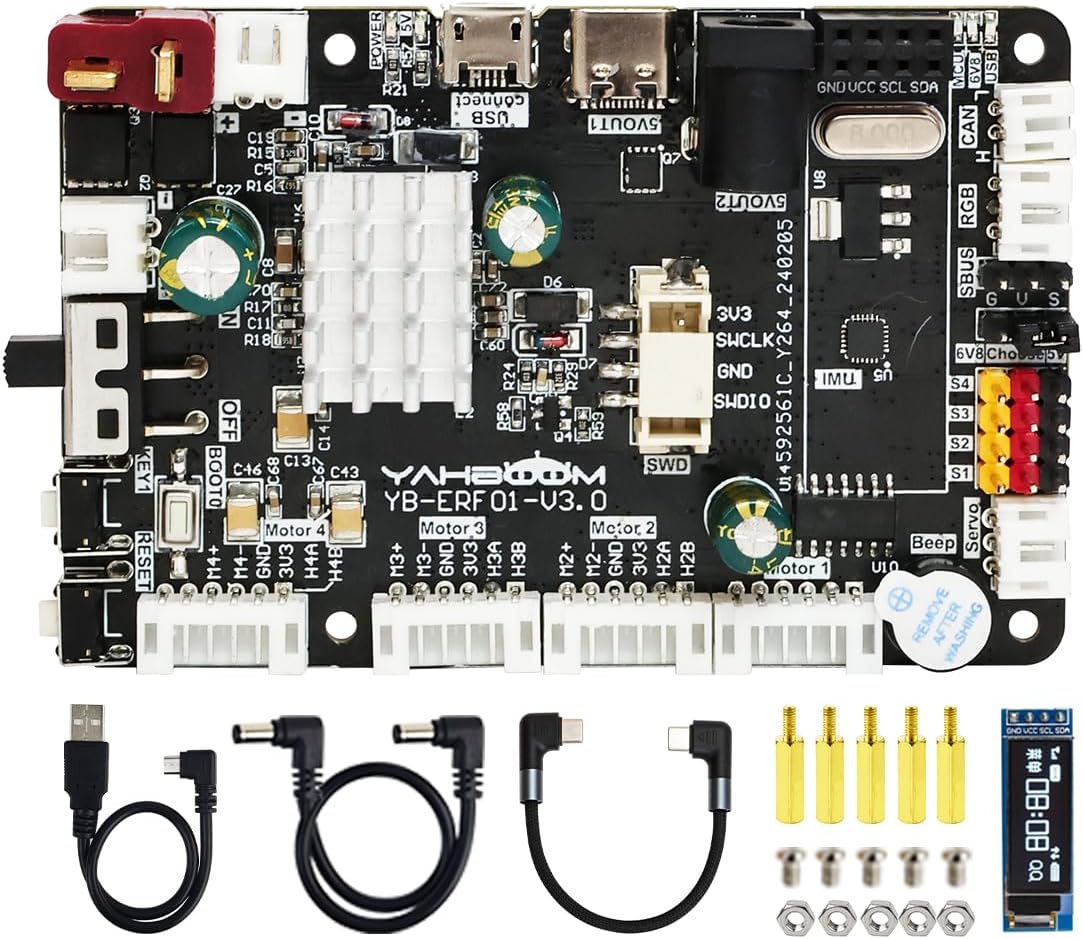
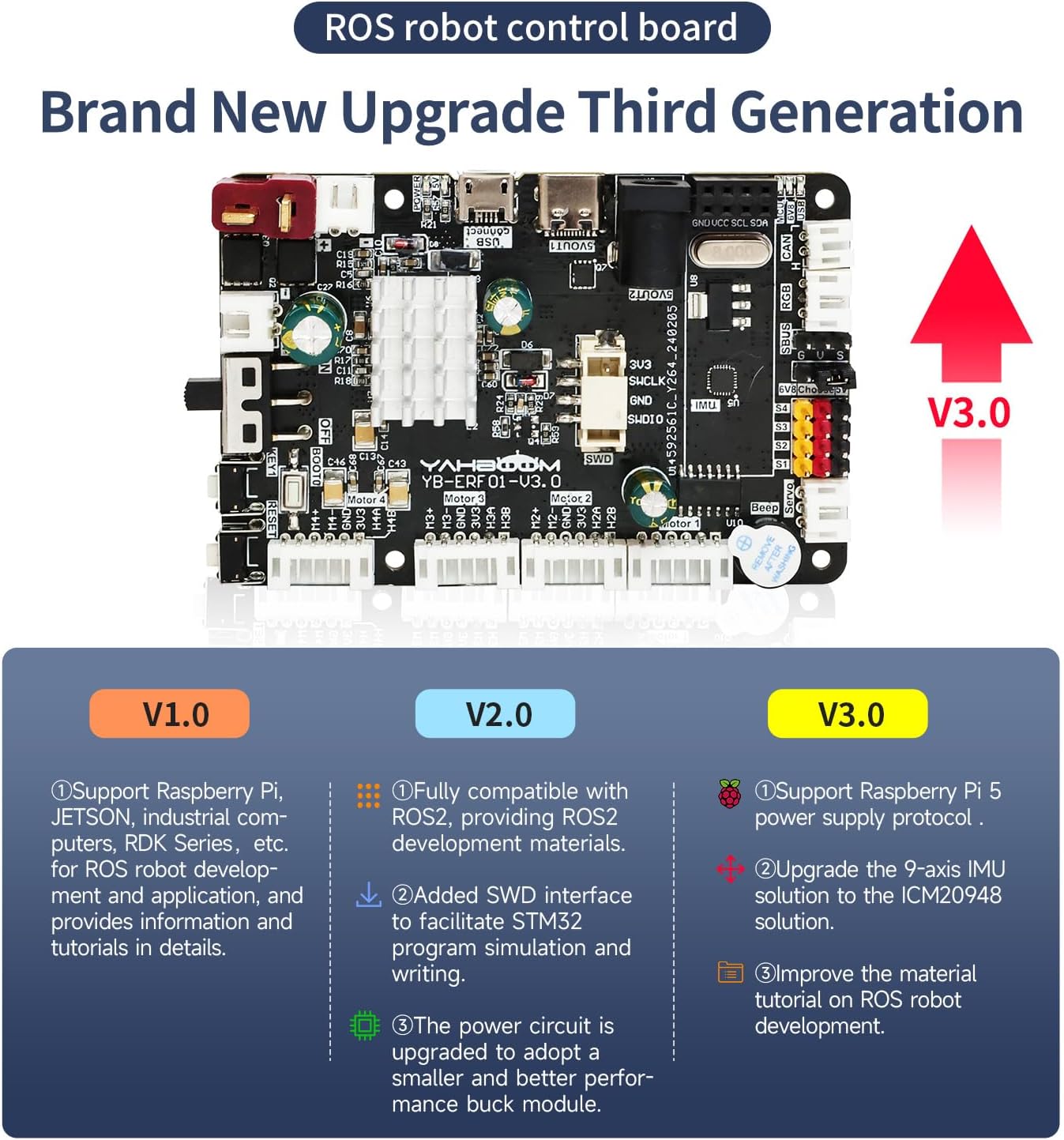
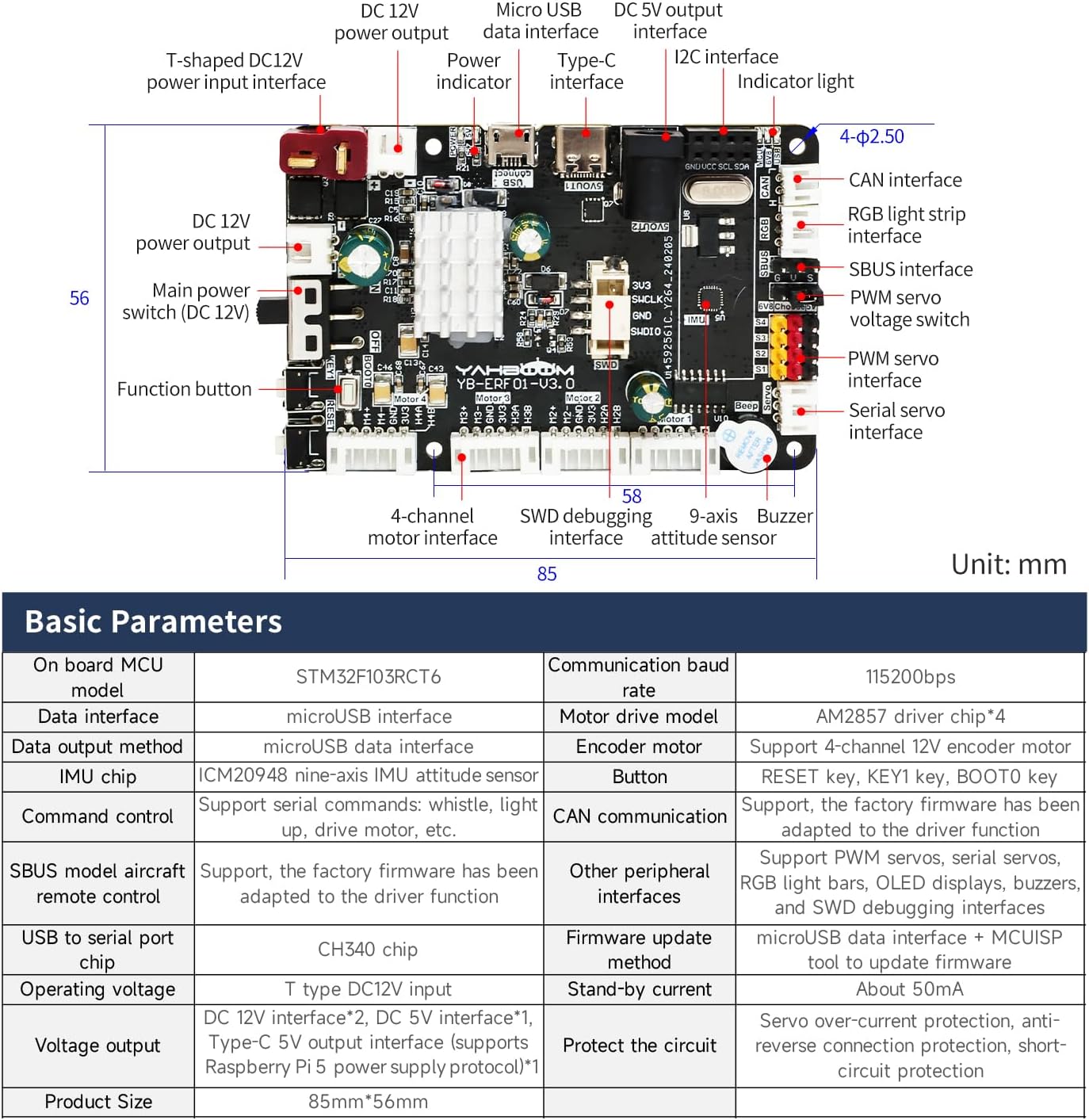
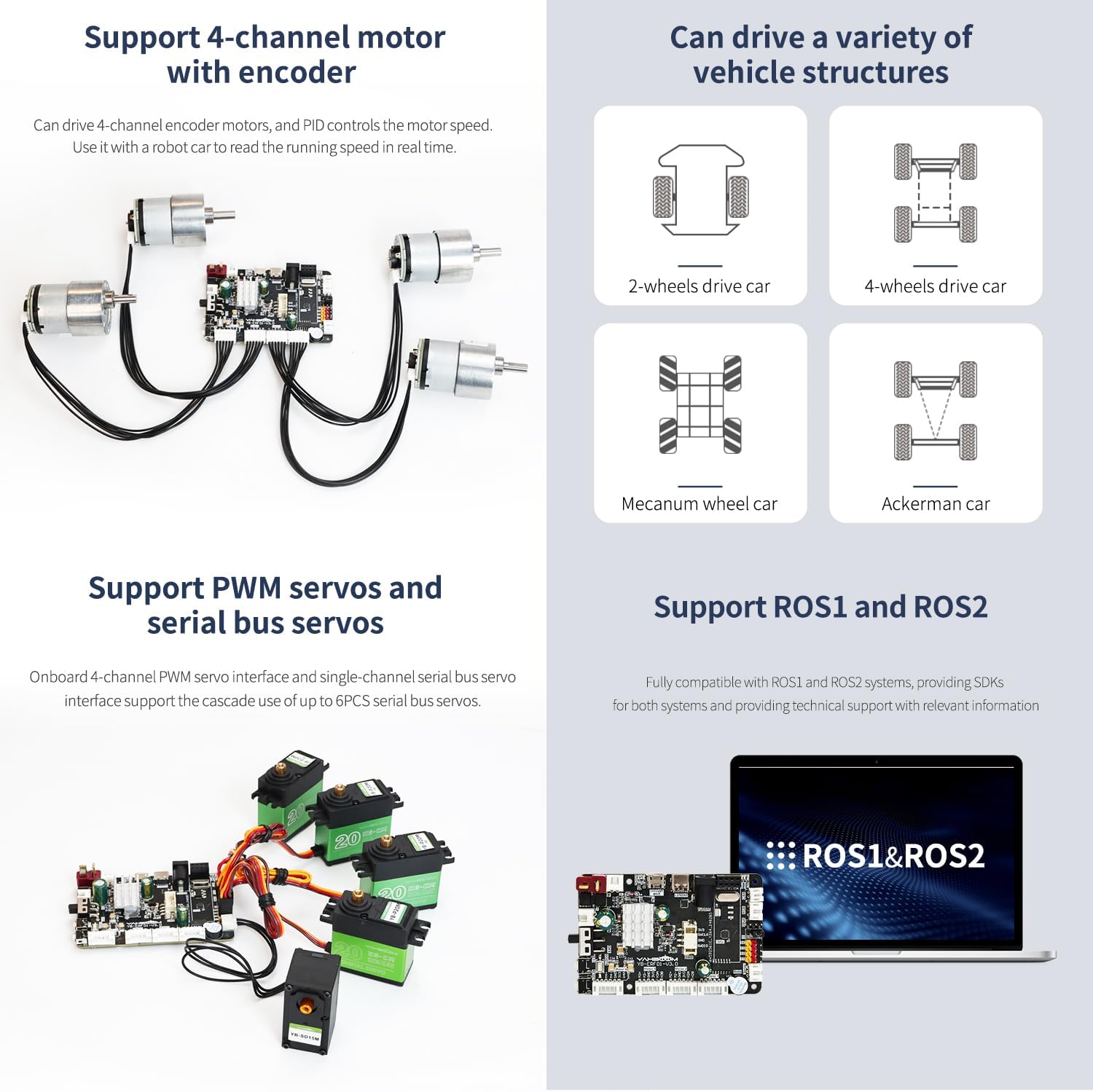
ROS2 Robot Control Board 3.0 Developed ROS2 Car Driver Extension IMU Raspberry Pi 5, with OLED Screen, Type C Cable, Supports Raspberry Pi 5 Power Supply
ROS2 Robot Control Board 3.0 توسعه یافته ROS2 Car Driver Extension IMU Raspberry Pi 5، با صفحه نمایش OLED، کابل نوع C، پشتیبانی از منبع تغذیه Raspberry Pi 5
ROS2 Robot Control Board 3.0 Developed ROS2 Car Driver Extension IMU Raspberry Pi 5, with OLED Screen, Type C Cable, Supports Raspberry Pi 5 Power Supply | قیمت یورویی 84€
رنگ:
حمل و نقل:
تعداد
قیمت
16,403,000
تومان
محصولات مرتبط













































سرویس لیوان LEONARDO HOME CESTI (مجموعه ۱۲ عددی) شامل پارچه جلا دهنده • لیوانهای قابل شستشو در ماشین ظرفشویی • مقاوم در برابر ضربه و مناسب برای استفاده روزمره • لیوانهای شراب با کیفیت بالا و دسته کوتاه • لیوانهای شامپاینی مدرن • سرویس لیوان ۱۲ عددی + پارچه جلا دهنده ۰۴۰۹۷۶
آمازون
11,953,000 تومان















مشخصات کلی
قیمت 84€
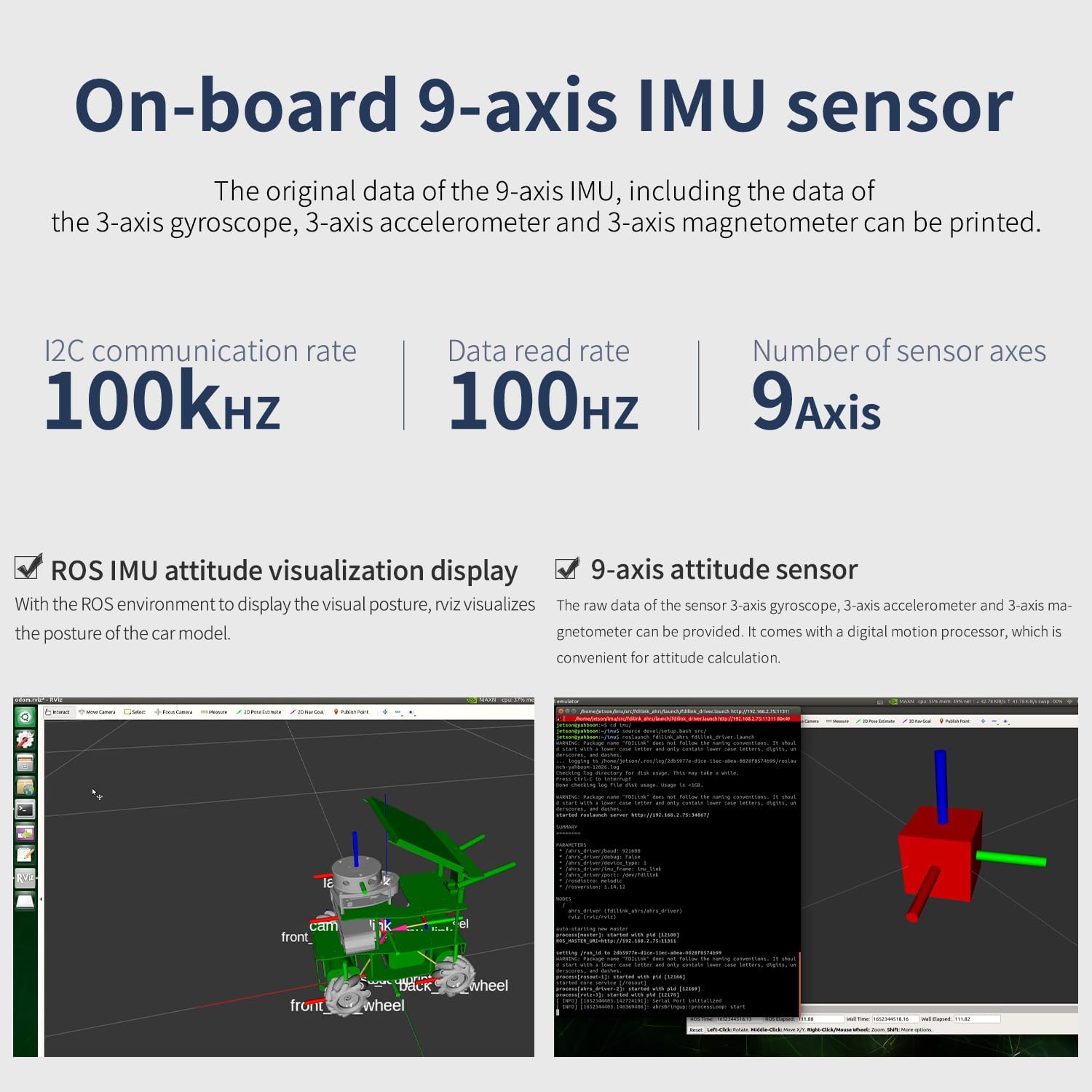
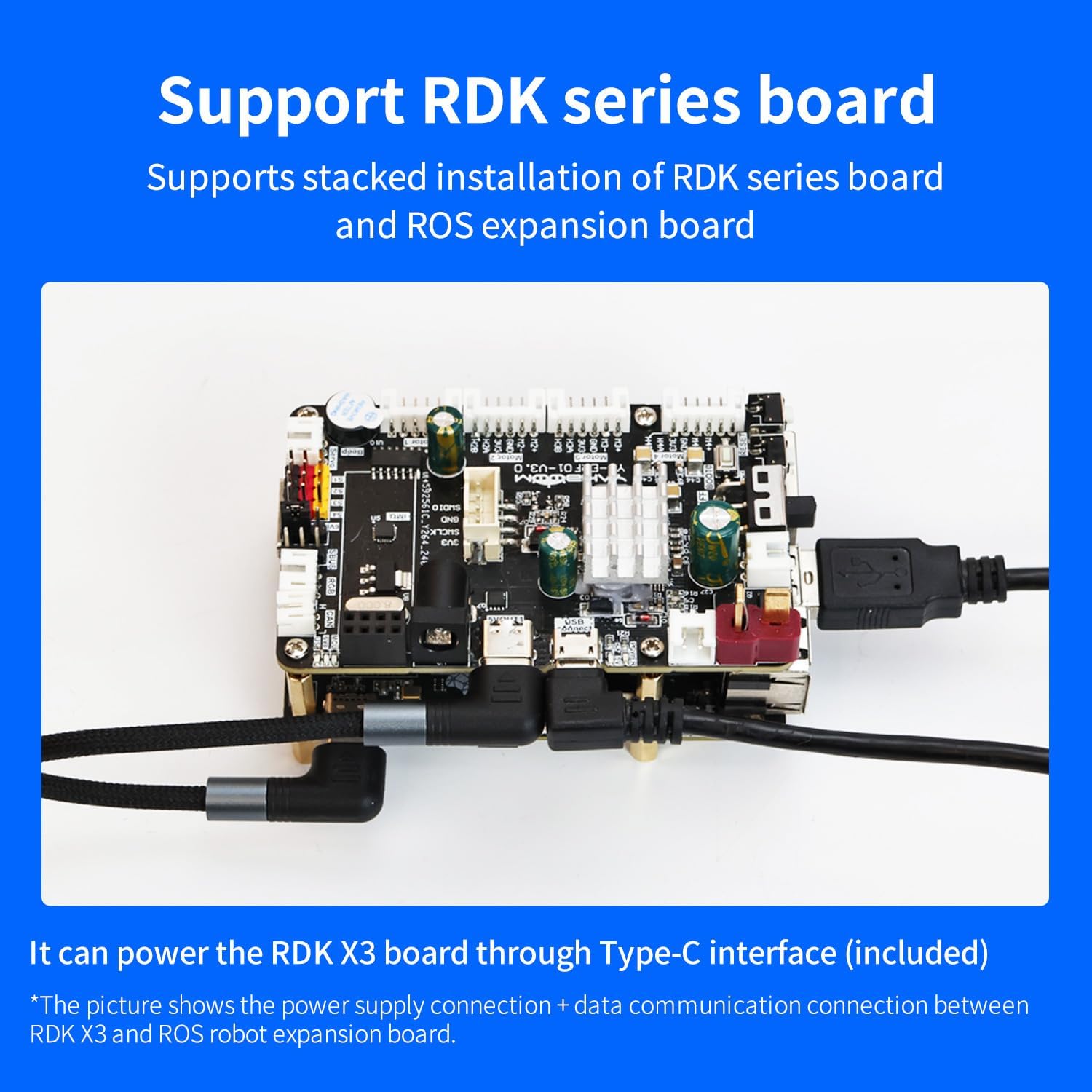
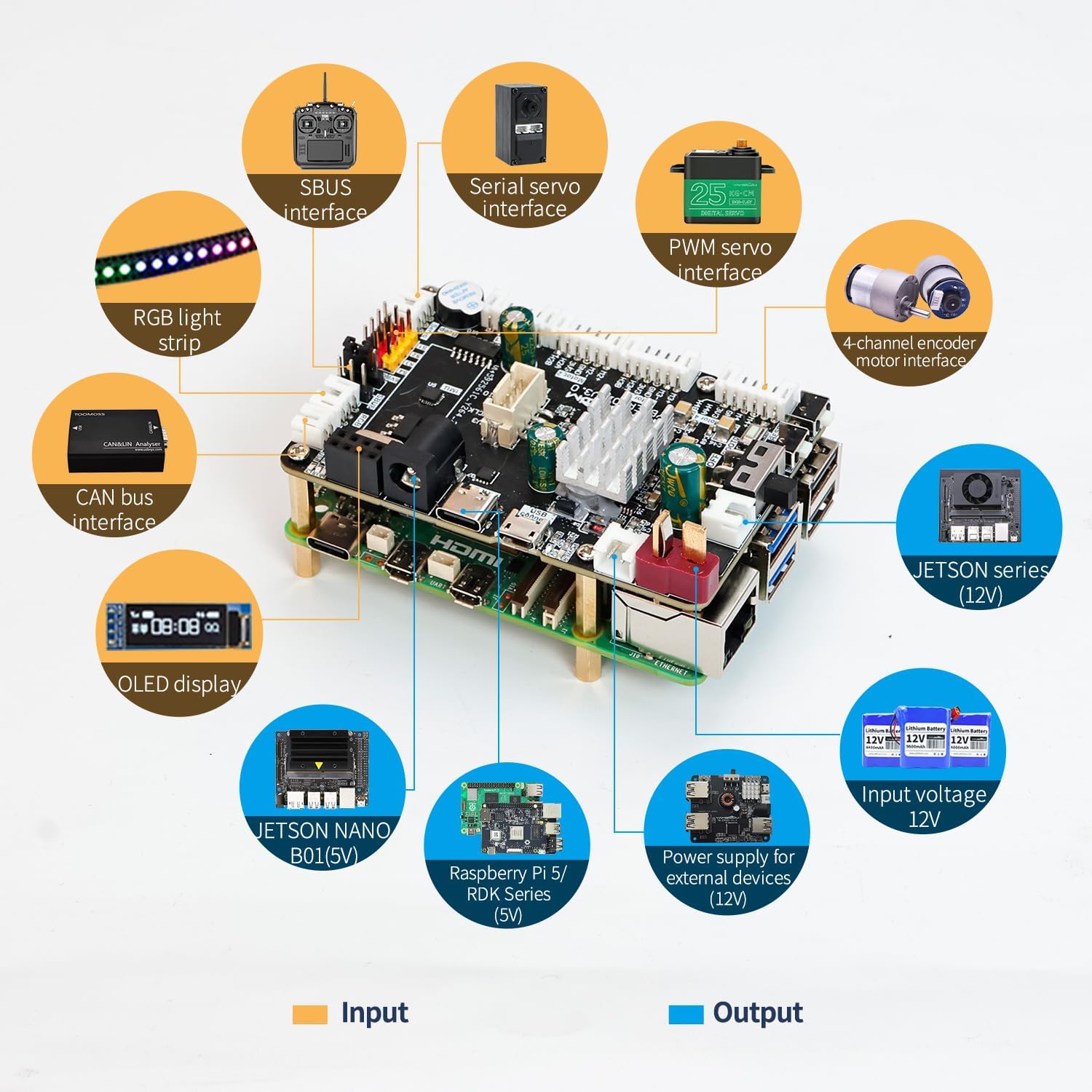
ROS2 Robot Control Board 3.0 Developed ROS2 Car Driver Extension IMU Raspberry Pi 5, with OLED Screen, Type C Cable, Supports Raspberry Pi 5 Power Supply لینک آمازون : https://www.amazon.de/dp/B0CZHM4CL5?th=1&psc=1 【سازگار با بردهای توسعه مختلف】سازگار جدید با بردهای توسعه سری Raspberry Pi5/4b/Jetson، Horizon و بردهای توسعه کنترلر مهندسی. همچنین دارای چندین خروجی رابط برق است که به شما امکان می دهد از طریق برد توسعه یک سیستم منبع تغذیه پایدار را خودتان انجام دهید. برد توسعه 3.0 از پروتکل منبع تغذیه pi5 پشتیبانی می کند و می تواند مادربرد Raspberry Pi 5 را بدون محدودیت فعلی تغذیه کند. 【رابط های دستگاه خارجی غنی】 برد توسعه با موتورهای کدگذاری 4 طرفه سازگار است، می تواند با انواع مدل ها سازگار شود و با چرخ دنده فرمان PWM و روش های ارتباطی باس سریال مانند چرخ Mecanum و دیفرانسیل چهار چرخ، پایه چرخ و غیره سازگار است. 【سنسور نگرش IMU 9 محوره】 راه اندازی اولیه رجیستر IMU را اجرا کنید و داده های اصلی IMU 9 محوری شامل داده های ژیروسکوپ سه محوره، شتاب سنج سه محوره و مغناطیس سنج سه محوره را چاپ کنید. از محیط ROS برای نمایش وضعیت بصری و از rviz برای نمایش بصری وضعیت مدل خودرو استفاده کنید. سازگار با ROS1 و ROS2 است و می تواند همراه با کیت ربات ROS توسعه یابد. 【منبع کامل سند】علاوه بر دانش اولیه برنامه STM32CUBEIDE، همچنین شامل موتورهای کد درایو، کنترلرهای سروو PWM، روترهای باس سریال، خواندن و حل دادههای حسگر نگرش محور MPU92509، کنترل رابط چند ارتباطی و غیره میشود. نمودار شماتیک سخت افزار باز بله، مطابق با مثال های درایور استفاده از آن آسان است. 【پیوند داده】 پیوند داده برای بورد توسعه نسخه 1.0 و 3.0 یکسان است: http://www.yahboom.net/study/ROS-Driver-Board
【Compatible with various development boards】Newly compatible with Raspberry Pi5/4b/Jetson series development boards, Horizon, and engineering controller development boards. It also has multiple power interface outputs, allowing you to DIY a stable power supply system through the expansion board. The 3.0 expansion board supports the pi5 power supply protocol and can power the Raspberry Pi 5 motherboard without current limitation. 【Rich external device interfaces】The expansion board is compatible with 4-way coding motors, can be adapted to a variety of models, and is compatible with PWM steering gear and three serial bus communication methods such as Mecanum wheel and four-wheel wheel differential, wheel base, etc. 【Onboard 9axis IMU attitude sensor】Operate the IMU register initialization and print the original data of the nine-axis IMU including the data of the three-axis gyroscope, three-axis accelerometer, and three-axis magnetometer. Use ROS environment to display the visual posture, and rviz to visually display the car model posture. Compatible with ROS1 and ROS2, and can be developed together with the ROS robot kit. 【Full document source】In addition to the basic knowledge of the STM32CUBEIDE program, it also includes drive code motors, PWM servo controllers, serial bus routers, reading and solving MPU92509 axis attitude sensor data, multi-communication interface control, etc.; the open hardware schematic diagram is Yes, it is easy to use according to the driver examples. 【Data link】The data link for expansion board versions 1.0 and 3.0 is the same: http://www.yahboom.net/study/ROS-Driver-Board | قیمت یورویی : 84€
شما هم می توانید در مورد این کالا نظر بدهید.
برای ثبت نظر، لازم است ابتدا وارد حساب کاربری خود شوید. اگر این محصول را قبلا خریده باشید، نظر شما به عنوان خریدار محصول ثبت خواهد شد.
ارسال دیدگاه
برای ارسال نظر باید وارد حساب کاربری شوید
هیچ دیدگاهی برای این محصول ثبت نشده است.